|
MC_Power Habilitação/Desabilitação de Eixo |
  
|
|
MC_Power Habilitação/Desabilitação de Eixo |
|
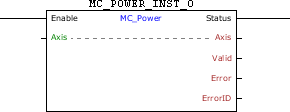
Bloque responsable por la habilitación/deshabilitación del eje del drive.
Representación Ladder
Características de Ejecución
Tamaño de Memoria de Programa |
40 Bytes |
Tamaño de Memoria de Datos |
4 Bytes |
Estructura del Bloque
Tipo de Variável |
Nome |
Tipo de Dado |
Descrição |
VAR_IN_OUT |
Axis |
BYTE |
Selección de eje de la operación (0 - Eje real) |
VAR_INPUT |
Enable |
BOOL |
Habilitación del bloque |
VAR_OUTPUT |
Status |
BOOL |
Habilitación de la salida |
Valid |
BOOL |
Señalizador de validad de las señales de salida |
|
Error |
BOOL |
Señalizador de error en la ejecución |
|
ErrorID |
WORD |
Identificador del error ocurrido |
|
VAR |
MC_POWER_INST_0 |
MC_POWER |
Instancia de acceso a la estructura del bloque |
Operación
Este bloque realiza un comando de habilitación/deshabilitación del eje Axis de acuerdo con la entrada Enable, deshabilitando si Enable es FALSE y habilitando si Enable es TRUE.
|
¡NOTA! Cuando el bloque MC_Power es usado para Habilitación/deshabilitación del eje real, ninguna entrada digital deberá estar programada para la función de Habilitación (opción 1), o podrá ocurrir la alarma A0120. |
Al habilitar el eje real por primera vez, el drive podrá operar en malla de posición, dependiendo del valor del parámetro P0773. Se debe ajustar la ganancia proporcional de posición (P0159) para obtener un mejor desempeño del drive.
Cuando el eje real esté deshabilitado, el estado del eje será Disabled. Al habilitar el eje real, el estado del eje cambiará para Standstill.
Cuando Enable tiene valor FALSE, Status permanece FALSE. La salida Status es activada cuando el bloque termina la ejecución exitosamente, permaneciendo en nivel TRUE hasta que Enable reciba FALSE.
En caso de que haya algún error en la ejecución, la salida Error será activada y ErrorID exhibirá el código del error según la tabla de abajo.
Código |
Descrição |
66 |
Drive en estado "ErrorStop". |
71 |
P202 diferente de 4. |
Ejemplo en Ladder
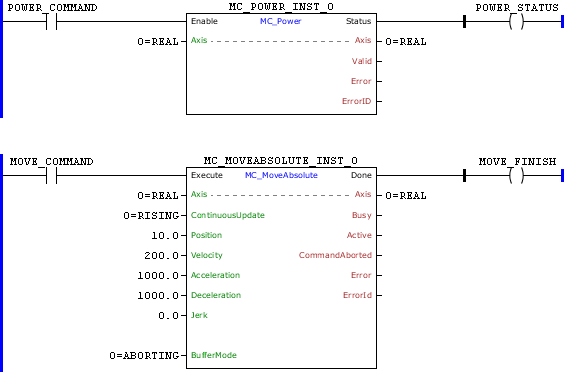
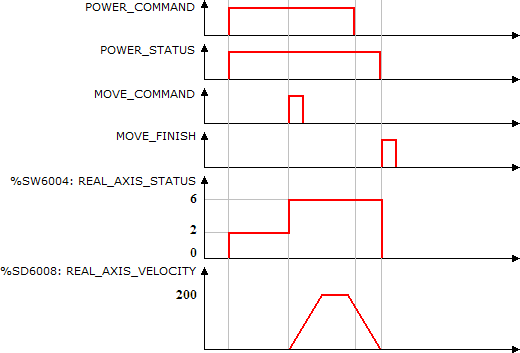
En el flanco de subida de POWER_COMMAND, el eje real es habilitado y su estado, el marcador del sistema REAL_AXIS_STATUS (%SW6004), es alterado para Standstill (%SW6004 = 2). La salida Status es ajustada.
Teniéndose la transición de subida de MOVE_COMMAND, el bloque MC_MoveAbsolute será ejecutado y se iniciará el posicionamiento para la posición 10 vueltas. El estado del eje es alterado para Discrete Motion (%SW3406 = 6).
Mientras el posicionamiento es ejecutado, POWER_COMMAND es reseteado. Como el BufferMode del MC_Power está configurado como Buffered, el eje solamente será deshabilitado en la conclusión del posicionamiento.
Al finalizar el posicionamiento, la salida Done del bloque MC_MoveAbsolute es ajustada por 1 ciclo de scan y el eje es deshabilitado (MC_Power.Enable = 0). El estado del eje es alterado para Disabled (%SW6004 = 0)
Ejemplo en ST
El siguiente ejemplo muestra las instrucciones para aplicar el ejemplo anterior en el lenguaje ST.
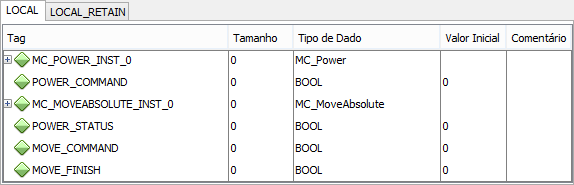
VAR POWER_COMMAND, POWER_STATUS, MOVE_COMMAND, MOVE_FINISH : BOOL; MC_POWER_INST_0 : FB_MC_Power; MC_MOVEABSOLUTE_INST_0 : FB_MC_MoveAbsolute; END_VAR
MC_POWER_INST_0.Enable := POWER_COMMAND; MC_POWER_INST_0(Axis:=0); POWER_STATUS := MC_POWER_INST_0.Status;
MC_MOVEABSOLUTE_INST_0.Execute := MOVE_COMMAND; MC_MOVEABSOLUTE_INST_0( Axis:=0, Continuousupdate:=0, Position:=LREAL#10.0, Velocity:=200.0, Acceleration:=1000.0, Deceleration:=1000.0, Jerk:=0.0, BufferMode:=0); MOVE_FINISH := MC_MOVEABSOLUTE_INST_0.Done;
|
|---|