|
System Markers |
  
|
|
System Markers |
|
The following variables contained in the GLOBAL_SYSTEM group of the variables table, have the fixed tag. The tag of system markers were divided into groups and subgroups, where:
Groups:
| • | SCA: reading and writing variables of the SCA06 servo drive; |
| • | CO: reading and writing variables of the CANopen network. |
Subgroups:
| • | STS: reading variable (status); |
| • | CMD: writing variable (command). |
Reading System Markers (Status)
Address |
Bit |
Modbus |
Tag |
Descrição |
Data Type |
Ladder |
|||||
%SB6000 |
0 |
0 |
FREQ_2HZ |
Oscillator with frequency of 2 Hz |
BOOL |
%SB6000 |
1 |
1 |
PULSE_1SCAN |
Pulse during the first scan cycle |
BOOL |
%SB6000 |
2 |
2 |
FALSE |
Allways 0 |
BOOL |
%SB6000 |
3 |
3 |
TRUE |
Allways 1 |
BOOL |
%SW6002 |
-- |
3001 |
ELAPSED_SCAN_CYCLES |
Elapsed scan cycles |
WORD |
Real Axis |
|||||
%SW6004 |
-- |
3002 |
REAL_AXIS_STATUS |
Real axis status (see note) |
WORD |
%SD6008 |
-- |
3004 |
REAL_AXIS_VELOCITY |
Real axis velocity |
REAL |
%SL6024 |
-- |
3012 |
REAL_AXIS_POSITION |
Real axis position |
LREAL |
Virtual Axis |
|||||
%SW6006 |
-- |
3003 |
VIRTUAL_AXIS_STATUS |
Virtual axis status (see note) |
WORD |
%SD6012 |
-- |
3006 |
VIRTUAL_AXIS_VELOCITY |
Virtual axis velocity |
REAL |
%SL6032 |
-- |
3016 |
VIRTUAL_AXIS_POSITION |
Virtual axis position |
LREAL |
Current |
|||||
%SD6016 |
-- |
3008 |
MOTOR_CURRENT |
Motor current |
REAL |
Position in the DI´s transition |
|||||
%SD6040 |
-- |
3020 |
POSITION_STORED_DI1 |
Position stored in the DI1 transition |
LREAL |
%SD6048 |
-- |
3024 |
POSITION_STORED_DI2 |
Position stored in the DI2 transition |
LREAL |
%SD6056 |
-- |
3028 |
POSITION_STORED_DI3 |
Position stored in the DI3 transition |
LREAL |
Counters |
|||||
%SD6064 |
-- |
3032 |
BUILT_IN_COUNTER |
Built-in counter value |
DINT |
%SD6068 |
-- |
3034 |
BUILT_IN_COUNTER_DI3 |
Built-in counter stored in the DI3 transition |
DINT |
%SD6072 |
-- |
3036 |
ENC1_COUNTER |
Encoder 1 counter value |
DINT |
%SD6076 |
-- |
3038 |
ENC2_COUNTER |
Encoder 2 counter value |
DINT |
%SD6080 |
-- |
3040 |
ENC_COUNTER_Z1 |
Encoder counter stored in the Z1 transition as defined in P00511 |
DINT |
%SD6084 |
-- |
3042 |
ENC_COUNTER_Z2 |
Encoder counter stored in the Z2 transition as defined in P00521 |
DINT |
CANopen |
|||||
%SB6100 |
0 |
800 |
CO_STS_MASTER_CONTACTED |
The CANopen master contacted all the slaves |
BOOL |
%SB6100 |
1 |
801 |
CO_STS_MASTER_CONFIG_OK |
The CANopen master downloaded the configurations of the slaves |
BOOL |
%SB6100 |
2 |
802 |
CO_STS_MASTER_ERROR_CTRL_OK |
Error control protocol (node guarding/heartbeat) initiated with the slaves |
BOOL |
%SB6100 |
3 |
803 |
CO_STS_MASTER_INIT_FINISHED |
The CANopen master initialized all the slaves |
BOOL |
%SB6100 |
4 |
804 |
CO_STS_MASTER_INIT_ERROR |
A slave presented an initialization error |
BOOL |
%SB6100 |
5 |
805 |
CO_STS_MASTER_ERROR_CTRL |
The CANopen master detected a fault in a slave through the error detection protocol |
BOOL |
%SB6100 |
6 |
806 |
CO_STS_MASTER_EMCY |
A slave reported EMCY |
BOOL |
%SB6101 |
0 |
808 |
CO_STS_MASTER_NMT_TOGGLE |
NMT command toggle bit feedback |
BOOL |
%SB6101 |
5 |
813 |
CO_STS_MASTER_BUS_OFF |
The CANopen master is in bus off |
BOOL |
%SB6101 |
6 |
814 |
CO_STS_MASTER_POWER_OFF |
The CANopen master has no power supply at the CAN interface |
BOOL |
%SB6101 |
7 |
815 |
CO_STS_MASTER_COMM_DISABLED |
Disabled CANopen master communication |
BOOL |
%SB6102 |
0 |
816 |
CO_STS_SLAVE1_CONTACTED |
The CANopen master successfully contacted the slave in the indicated address |
BOOL |
%SB6102 |
1 |
817 |
CO_STS_SLAVE1_CONFIG_OK |
The CANopen master successfully configured the slave |
BOOL |
%SB6102 |
2 |
818 |
CO_STS_SLAVE1_ERROR_CTRL_OK |
Error control protocol (node guarding/heartbeat) initiated with the slave |
BOOL |
%SB6102 |
3 |
819 |
CO_STS_SLAVE1_INIT_FINISHED |
Concluded slave initialization |
BOOL |
%SB6102 |
4 |
820 |
CO_STS_SLAVE1_INIT_ERROR |
Initialization error in the indicated address slave |
BOOL |
%SB6102 |
5 |
821 |
CO_STS_SLAVE1_ERROR_CTRL_FAIL |
Fault detected in some slave from the CANopen master error detection protocol |
BOOL |
%SB6102 |
6 |
822 |
CO_STS_SLAVE1_EMCY |
The slave in the indicated address reported EMCY error |
BOOL |
%SB6104 |
0 |
832 |
CO_STS_SLAVE2_CONTACTED |
The CANopen master successfully contacted the slave in the indicated address |
BOOL |
%SB6104 |
1 |
833 |
CO_STS_SLAVE2_CONFIG_OK |
The CANopen master successfully configured the slave |
BOOL |
%SB6104 |
2 |
834 |
CO_STS_SLAVE2_ERROR_CTRL_OK |
Error control protocol (node guarding/heartbeat) initiated with the slave |
BOOL |
%SB6104 |
3 |
835 |
CO_STS_SLAVE2_INIT_FINISHED |
Concluded slave initialization |
BOOL |
%SB6104 |
4 |
836 |
CO_STS_SLAVE2_INIT_ERROR |
Initialization error in the indicated address slave |
BOOL |
%SB6104 |
5 |
837 |
CO_STS_SLAVE2_ERROR_CTRL_FAIL |
Fault detected in some slave from the CANopen master error detection protocol |
BOOL |
%SB6104 |
6 |
838 |
CO_STS_SLAVE2_EMCY |
The slave in the indicated address reported EMCY error |
BOOL |
... |
... |
... |
... |
... |
|
%SB6354 |
0 |
2832 |
CO_STS_SLAVE127_CONTACTED |
The CANopen master successfully contacted the slave in the indicated address |
BOOL |
%SB6354 |
1 |
2833 |
CO_STS_SLAVE127_CONFIG_OK |
The CANopen master successfully configured the slave |
BOOL |
%SB6354 |
2 |
2834 |
CO_STS_SLAVE127_ERROR_CTRL_OK |
Error control protocol (node guarding/heartbeat) initiated with the slave |
BOOL |
%SB6354 |
3 |
8235 |
CO_STS_SLAVE127_INIT_FINISHED |
Concluded slave initialization |
BOOL |
%SB6354 |
4 |
2836 |
CO_STS_SLAVE127_INIT_ERROR |
Initialization error in the indicated address slave |
BOOL |
%SB6354 |
5 |
2837 |
CO_STS_SLAVE127_ERROR_CTRL_FAIL |
Fault detected in some slave from the CANopen master error detection protocol |
BOOL |
%SB6354 |
6 |
2838 |
CO_STS_SLAVE127_EMCY |
The slave in the indicated address reported EMCY error |
BOOL |
%SW6360 |
-- |
3180 |
CO_SDO_ERROR_NODE_ID |
SDO error: address of the slave with the last detected SDO error |
WORD |
%SW6362 |
-- |
3181 |
CO_SDO_ERROR_OBJECT_INDEX |
SDO error: object index |
WORD |
%SW6364 |
-- |
3182 |
CO_SDO_ERROR_OBJECT_SUBINDEX |
SDO error: object sub-index |
WORD |
%SW6366 |
-- |
3183 |
CO_SDO_ERROR_FUNCTION |
SDO error: function (writing/reading) |
WORD |
%SD6368 |
-- |
3184 |
CO_SDO_ERROR_VALUE |
SDO error: value |
DWORD |
%SD6372 |
-- |
3186 |
CO_SDO_ERROR_CODE |
SDO error: error code |
DWORD |
%SB6380 |
-- |
3190 |
CO_EMCY_SLAVE_ID |
Last reported EMCY: slave address |
BYTE |
%SB6382 |
-- |
3191 |
CO_EMCY_DATA |
Last reported EMCY: object data |
BYTE |
Writing / Reading System Markers (Command)
Address |
Bit |
Modbus |
Tag |
Description |
CANopen |
||||
%CB6000 |
-- |
3000 |
CO_CMD_NMT_COMMAND |
NMT command transmission by the CANopen master: command code |
%CB6001 |
0 |
8 |
CO_CMD_NMT_TOGGLE |
NMT command transmission by the CANopen master: toggle bit |
%CB6001 |
7 |
15 |
CO_CMD_DISABLE |
Disables the CANopen communication |
%CB6002 |
-- |
3001 |
CO_CMD_NMT_SLAVE_ADDR |
NMT command transmission by the CANopen master: slave address |
NOTE!
Below description of the real axis and virtual status:
0. Disabled.
1. Errorstop.
2. Standstill.
3. Stopping.
4. Homing.
5. Continuous Motion.
6. Discrete Motion.
7. Synchronized Motion.
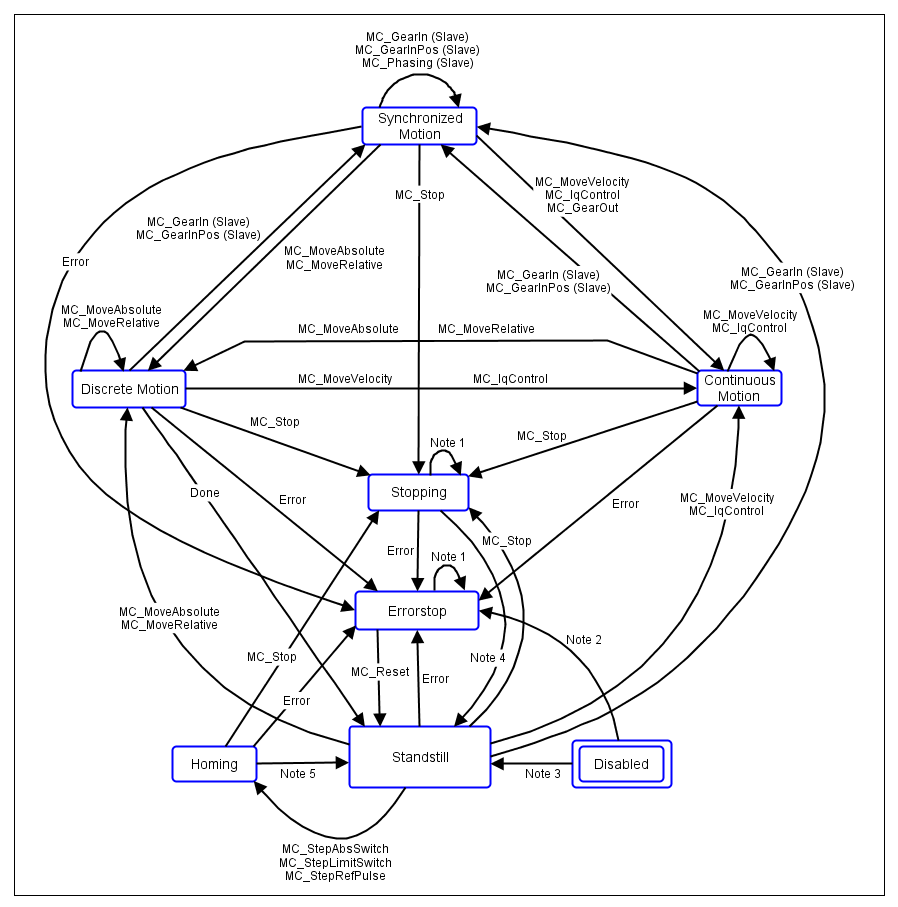
Note 1: When the drive is in "Stopping" on "Errorstop" every block can be called, but only MC_Reset block is executed;
Note 2: Attempt to enable the drive, but the drive is in fault;
Note 3: Enabling the drive and the drive is not in fault;
Note 4: MC_Stop.Done is true and MC_Stop.Execute is false;
Note 5: MC_StepDirect, MC_StepRefPulse or MC_FinishHoming.