|
MW_Stop2 Parada controlada de eixo |
  
|
|
MW_Stop2 Parada controlada de eixo |
|
Bloco responsável pela execução de uma parada controlada.
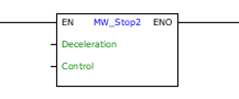
Representação Ladder
Estrutura do Bloco
Tipo de Variável |
Nome |
Tipo de Dado |
Descrição |
VAR_INPUT |
EN |
BOOL |
Habilitação do bloco |
Deceleration |
REAL INT UINT WORD |
Desaceleração da parada [rpm/s] |
|
Control |
0 = Automatic 1 = Velocity 2 = Position |
Define o tipo de controle ao finalizar a parada: Automatic – Mantém o controle atual. Velocity – Não mantém a posição após finalizar a parada. Position – Mantém a posição após finalizar a parada. |
|
VAR_OUTPUT |
ENO |
BOOL |
Habilitação da saída |
Funcionamento
Se a entrada EN for "0", o bloco não é executado e a saída ENO é zero.
Se a entrada EN for 1, mesmo que seja por um ciclo de scan, é executado uma parada com um perfil trapezoidal baseado nas características programadas nos argumentos.
Quando a parada é concluída, a saída ENO vai para 1 durante um ciclo de scan, retornando a 0 posteriormente.
Depois de iniciado, o bloco de parada não é mais cancelado até a sua parada total, mesmo que a entrada EN vá para 0 antes do fim de sua parada.
Se o modo de controle for configurado em Position, enquanto a entrada EN estiver em 1 a posição após finalizar a parada será mantida.
|
NOTA! O modo de controle Position é permitido somente quando o tipo de controle do motor for Encoder (P0202 = 4). |
|
NOTA! Caso o valor do parâmetro P0133 (Velocidade Mínima) estiver com um valor diferente de zero, ao executar o bloco MW_Stop2 a desaceleração da velocidade do motor será realizada até o valor de P0133. |