|
Marcadores de Sistema |
  
|
|
Marcadores de Sistema |
|
Las variables abajo, contenidas en el grupo GLOBAL_SYSTEM de la tabla de variables, poseen el tag fijo. Lo tag de los marcadores de sistema fueram divididos en grupos y subgrupos donde:
Grupos:
| • | SCA: variables de lectura y escritura del servoconvertidor SCA06; |
| • | CO: variables de lectura y escritura de la red de comunicación CANopen |
Subgrupos:
| • | STS: variable de lectura (status); |
| • | CMD: variable de escritura (comando). |
Marcadores de Sistema de Lectura (Status)
Dirección |
Bit |
Modbus |
Tag |
Descripción |
Tipo de Dado |
Ladder |
|||||
%SB6000 |
0 |
0 |
FREQ_2HZ |
Oscilador con una frecuencia de 2 Hz |
BOOL |
%SB6000 |
1 |
1 |
PULSE_1SCAN |
Pulso durante el primer ciclo de scan |
BOOL |
%SB6000 |
2 |
2 |
FALSE |
Siempre en 0 |
BOOL |
%SB6000 |
3 |
3 |
TRUE |
Siempre en 1 |
BOOL |
%SW6002 |
-- |
3001 |
ELAPSED_SCAN_CYCLES |
Ciclos de scan transcurridos |
WORD |
Eje Real |
|||||
%SW6004 |
-- |
3002 |
REAL_AXIS_STATUS |
Estado del eje real (ver nota) |
WORD |
%SD6008 |
-- |
3004 |
REAL_AXIS_VELOCITY |
Velocidad del eje real |
REAL |
%SL6024 |
-- |
3012 |
REAL_AXIS_POSITION |
Posición del eje real |
LREAL |
Eje Virtual |
|||||
%SW6006 |
-- |
3003 |
VIRTUAL_AXIS_STATUS |
Estado del eje virtual (ver nota) |
WORD |
%SD6012 |
-- |
3006 |
VIRTUAL_AXIS_VELOCITY |
Velocidad del eje virtual |
REAL |
%SL6032 |
-- |
3016 |
VIRTUAL_AXIS_POSITION |
Posición del eje virtual |
LREAL |
Corriente |
|||||
%SD6016 |
-- |
3008 |
MOTOR_CURRENT |
Corriente del motor |
REAL |
Posición en la transición de DI´s |
|||||
%SD6040 |
-- |
3020 |
POSITION_STORED_DI1 |
Posición almacenado en la transición de la DI1 |
LREAL |
%SD6048 |
-- |
3024 |
POSITION_STORED_DI2 |
Posición almacenado en la transición de la DI2 |
LREAL |
%SD6056 |
-- |
3028 |
POSITION_STORED_DI3 |
Posición almacenado en la transición de la DI3 |
LREAL |
Contadores |
|||||
%SD6064 |
-- |
3032 |
BUILT_IN_COUNTER |
Valor del contador padrón |
DINT |
%SD6068 |
-- |
3034 |
BUILT_IN_COUNTER_STORED_DI3 |
Valor del contador padrón almacenado en la transición de la DI3 |
DINT |
%SD6072 |
-- |
3036 |
ENC1_COUNTER |
Valor del contador del encoder 1 |
DINT |
%SD6076 |
-- |
3038 |
ENC2_COUNTER |
Valor del contador del encoder 2 |
DINT |
%SD6080 |
-- |
3040 |
ENC_COUNTER_Z1 |
Contador del encoder almacenado en la transición del Z1 como se define en P00511 |
DINT |
%SD6084 |
-- |
3042 |
ENC_COUNTER_Z2 |
Contador del encoder almacenado en la transición del Z2 como se define en P00521 |
DINT |
CANopen |
|||||
%SB6100 |
0 |
800 |
CO_STS_MASTER_CONTACTED |
Maestro CANopen contactó todos los esclavos |
BOOL |
%SB6100 |
1 |
801 |
CO_STS_MASTER_CONFIG_OK |
Maestro CANopen realizó download de las configuraciones de los esclavos |
BOOL |
%SB6100 |
2 |
802 |
CO_STS_MASTER_ERROR_CTRL_OK |
Protocolo de control de errores (node guarding/heartbeat) iniciado con los esclavos |
BOOL |
%SB6100 |
3 |
803 |
CO_STS_MASTER_INIT_FINISHED |
Inicialización de todos los esclavos realizada por el maestro CANopen |
BOOL |
%SB6100 |
4 |
804 |
CO_STS_MASTER_INIT_ERROR |
Uno de los esclavos presentó error de inicialización |
BOOL |
%SB6100 |
5 |
805 |
CO_STS_MASTER_ERROR_CTRL |
Detectada falla en uno de los esclavos en el protocolo de detección de errores por el maestro CANopen |
BOOL |
%SB6100 |
6 |
806 |
CO_STS_MASTER_EMCY |
Uno de los esclavos indicó EMCY |
BOOL |
%SB6101 |
0 |
808 |
CO_STS_MASTER_NMT_TOGGLE |
Feedback del toggle bit del comando NMT |
BOOL |
%SB6101 |
5 |
813 |
CO_STS_MASTER_BUS_OFF |
Maestro CANopen está en bus off |
BOOL |
%SB6101 |
6 |
814 |
CO_STS_MASTER_POWER_OFF |
Maestro CANopen no posee alimentación en la interfaz CAN |
BOOL |
%SB6101 |
7 |
815 |
CO_STS_MASTER_COMM_DISABLED |
Comunicación del maestro CANopen está deshabilitada |
BOOL |
%SB6102 |
0 |
816 |
CO_STS_SLAVE1_CONTACTED |
Esclavo en la dirección indicada fue contactado con éxito por el maestro CANopen |
BOOL |
%SB6102 |
1 |
817 |
CO_STS_SLAVE1_CONFIG_OK |
Configuración del esclavo fue realizada con éxito por el maestro CANopen |
BOOL |
%SB6102 |
2 |
818 |
CO_STS_SLAVE1_ERROR_CTRL_OK |
Protocolo de control de errores (node guarding/heartbeat) iniciado con el esclavo |
BOOL |
%SB6102 |
3 |
819 |
CO_STS_SLAVE1_INIT_FINISHED |
Inicialización del esclavo concluida |
BOOL |
%SB6102 |
4 |
820 |
CO_STS_SLAVE1_INIT_ERROR |
Error en la inicialización del esclavo en la dirección indicada |
BOOL |
%SB6102 |
5 |
821 |
CO_STS_SLAVE1_ERROR_CTRL_FAIL |
Falla detectada en algún esclavo en el protocolo de la detención de los error para el maestro CANopen |
BOOL |
%SB6102 |
6 |
822 |
CO_STS_SLAVE1_EMCY |
Esclavo en la dirección indicada indicó error por EMCY |
BOOL |
%SB6104 |
0 |
832 |
CO_STS_SLAVE2_CONTACTED |
Esclavo en la dirección indicada fue contactado con éxito por el maestro CANopen |
BOOL |
%SB6104 |
1 |
833 |
CO_STS_SLAVE2_CONFIG_OK |
Configuración del esclavo fue realizada con éxito por el maestro CANopen |
BOOL |
%SB6104 |
2 |
834 |
CO_STS_SLAVE2_ERROR_CTRL_OK |
Protocolo de control de errores (node guarding/heartbeat) iniciado con el esclavo |
BOOL |
%SB6104 |
3 |
835 |
CO_STS_SLAVE2_INIT_FINISHED |
Inicialización del esclavo concluida |
BOOL |
%SB6104 |
4 |
836 |
CO_STS_SLAVE2_INIT_ERROR |
Error en la inicialización del esclavo en la dirección indicada |
BOOL |
%SB6104 |
5 |
837 |
CO_STS_SLAVE2_ERROR_CTRL_FAIL |
Falla detectada en algún esclavo en el protocolo de la detención de los error para el maestro CANopen |
BOOL |
%SB6104 |
6 |
838 |
CO_STS_SLAVE2_EMCY |
Esclavo en la dirección indicada indicó error por EMCY |
BOOL |
... |
... |
... |
... |
... |
|
%SB6354 |
0 |
2832 |
CO_STS_SLAVE127_CONTACTED |
Esclavo en la dirección indicada fue contactado con éxito por el maestro CANopen |
BOOL |
%SB6354 |
1 |
2833 |
CO_STS_SLAVE127_CONFIG_OK |
Configuración del esclavo fue realizada con éxito por el maestro CANopen |
BOOL |
%SB6354 |
2 |
2834 |
CO_STS_SLAVE127_ERROR_CTRL_OK |
Protocolo de control de errores (node guarding/heartbeat) iniciado con el esclavo |
BOOL |
%SB6354 |
3 |
8235 |
CO_STS_SLAVE127_INIT_FINISHED |
Inicialización del esclavo concluida |
BOOL |
%SB6354 |
4 |
2836 |
CO_STS_SLAVE127_INIT_ERROR |
Error en la inicialización del esclavo en la dirección indicada |
BOOL |
%SB6354 |
5 |
2837 |
CO_STS_SLAVE127_ERROR_CTRL_FAIL |
Falla detectada en algún esclavo en el protocolo de la detención de los error para el maestro CANopen |
BOOL |
%SB6354 |
6 |
2838 |
CO_STS_SLAVE127_EMCY |
Esclavo en la dirección indicada indicó error por EMCY |
BOOL |
%SW6360 |
-- |
3180 |
CO_SDO_ERROR_NODE_ID |
Erro de SDO: endereço do escravo do último erro de SDO detectado |
WORD |
%SW6362 |
-- |
3181 |
CO_SDO_ERROR_OBJECT_INDEX |
Error de SDO: índice del objeto |
WORD |
%SW6364 |
-- |
3182 |
CO_SDO_ERROR_OBJECT_SUBINDEX |
Error de SDO: subíndice del objeto |
WORD |
%SW6366 |
-- |
3183 |
CO_SDO_ERROR_FUNCTION |
Error de SDO: función (lectura/escritura) |
WORD |
%SD6368 |
-- |
3184 |
CO_SDO_ERROR_VALUE |
Error de SDO: valor |
DWORD |
%SD6372 |
-- |
3186 |
CO_SDO_ERROR_CODE |
Error de SDO: código del error |
DWORD |
%SB6380 |
-- |
3190 |
CO_EMCY_SLAVE_ID |
Último EMCY reportado: dirección del esclavo |
BYTE |
%SB6382 |
-- |
3191 |
CO_EMCY_DATA |
Último EMCY reportado: datos del objeto |
BYTE |
Marcadores de Sistema de Escritura / Lectura (Comando)
Dirección |
Bit |
Modbus |
Tag |
Descripción |
CANopen |
||||
%CB6000 |
-- |
3000 |
CO_CMD_NMT_COMMAND |
Envio de comando NMT por el maestro CANopen: código del comando |
%CB6001 |
0 |
8 |
CO_CMD_NMT_TOGGLE |
Envio de comando NMT por el maestro CANopen: toggle bit |
%CB6001 |
7 |
15 |
CO_CMD_DISABLE |
Deshabilita comunicación CANopen |
%CB6002 |
-- |
3001 |
CO_CMD_NMT_SLAVE_ADDR |
Envío de comando NMT por el maestro CANopen: dirección del esclavo |
¡NOTA!
Abajo descripción de los estados del eje real y virtual:
0. Disabled (Deshabilitado).
1. Errorstop (Eje con el error).
2. Standstill (Habilitado y no hay bloque de movimiento activo).
3. Stopping (Stop en ejecución).
4. Homing (Haciendo referencia).
5. Continuous Motion (Movimiento continuo).
6. Discrete Motion (Movimiento discreto).
7. Synchronized Motion (Movimiento sincronizado).
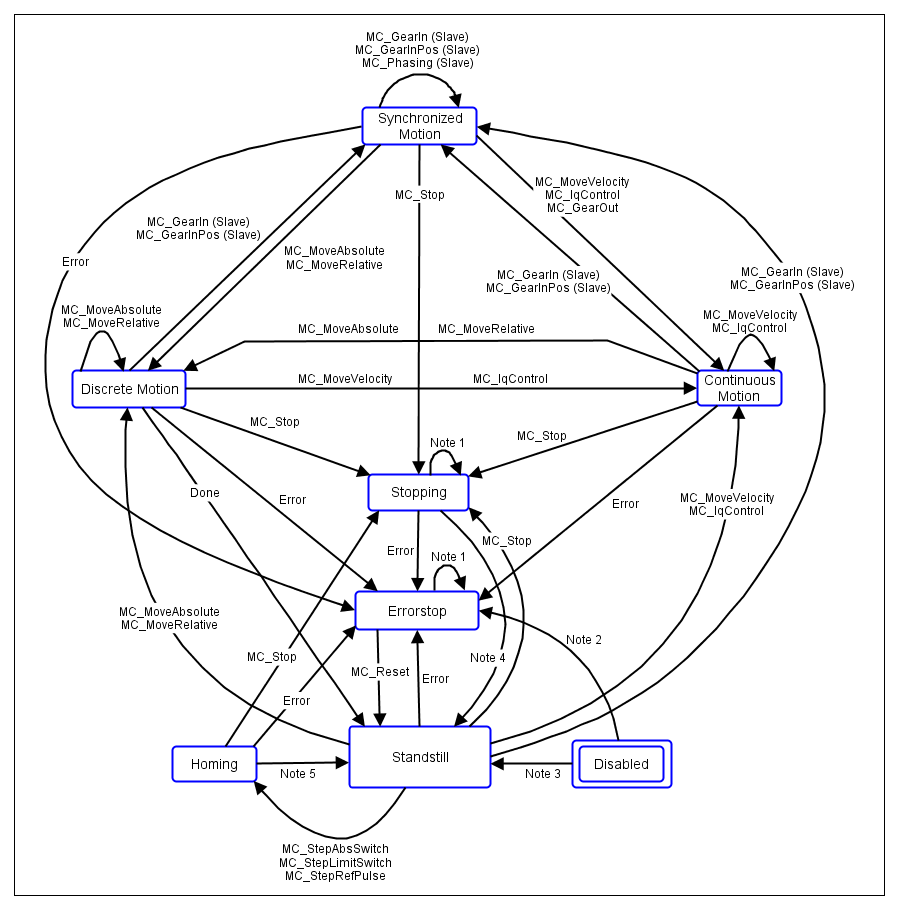
Note 1: Cuando la unidad está en el "Parar" o "Errorstop" todos los bloques pueden ser llamados, pero sólo se ejecuta el bloque MC_Reset;
Note 2: Intento de activar la unidad, pero la unidad es defectuosa;
Note 3: Habilitar la unidad y la unidad no es defectuosa;
Note 4: MC_Stop.Done és verdadera y MC_Stop.Execute és falsa;
Note 5: MC_StepDirect, MC_StepRefPulse o MC_FinishHoming.