|
MC_CamIn Posicionamento por tabela CAM |
  
|
|
MC_CamIn Posicionamento por tabela CAM |
|
Bloque responsable por la ejecución de un posicionamiento definido por una tabla de puntos de una curva CAM.
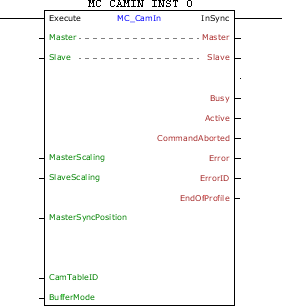
Representación Ladder
Características de Ejecución
Tamaño de Memoria de Programa |
92 Bytes |
Tamaño de Memoria de Datos |
52 Bytes |
Estructura del Bloque
Tipo de Variável |
Nome |
Tipo de Dado |
Descrição |
VAR_IN_OUT |
Master |
BYTE |
Selección de maestro de la operación (0 - Entradas digitales rápidas) (1 - CANopen) (2 - Encoder 1) (3 - Eje virtual) (4 - Encoder 2) |
Slave |
BYTE |
Selección de esclavo de la operación (0 - Eje real) (1 - Eje Virtual 1) |
|
VAR_INPUT |
Execute |
BOOL |
Habilitación del bloque |
MasterScaling |
REAL |
Ganancia en los valores de posición del eje maestro. |
|
SlaveScaling |
REAL |
Ganancia en los valores de posición del eje esclavo. |
|
MasterSyncPosition |
LREAL |
Posición del eje maestro donde el esclavo iniciará la curva CAM. |
|
CamTableID |
WORD |
Tabla CAM seleccionada |
|
BufferMode |
BYTE |
Modo de inicio de ejecución (0 - Inicia bloque inmediatamente, si hay otro bloque en ejecución, será abortado) (1 - Si otro bloque está en ejecución, el bloque en ejecución continuará su movimiento hasta concluirlo y ese nuevo bloque aguardará para entonces ser ejecutado.) (6 - Si algún otro bloque está en ejecución, este bloque entrará en error 52 y no será ejecutado. La alarma A00052 será mostrada en la IHM.) |
|
VAR_OUTPUT |
InSync |
BOOL |
Habilitación de la salida |
Busy |
BOOL |
Señalizador de que el bloque aún no fue finalizado |
|
Active |
BOOL |
Señalizador de bloque con control sobre el eje |
|
CommandAborted |
BOOL |
Señalizador de comando abortado |
|
Error |
BOOL |
Señalizador de error en la ejecución |
|
ErrorID |
WORD |
Identificador del error ocurrido |
|
EndOfProfile |
BOOL |
Señalizador de fin del perfil CAM |
|
VAR |
MC_CAMIN_INST_0 |
MC_CAMIN |
Instancia de acceso a la estructura del bloque |
Operación
Este bloque, cuando detecta un flanco de subida en Execute, envía un comando para que drive ejecute un posicionamiento definido por CamTableID.
Cuando Execute tiene valor FALSE, Done permanece FALSE. La salida Done es activada cuando el bloque termina la ejecución exitosamente, permaneciendo en nivel TRUE hasta que Execute reciba FALSE.
En caso de que haya algún error en la ejecución, la salida Error será activada y ErrorID exhibirá el código del error según la tabla de abajo.
Código |
Descrição |
52 |
Intento de ejecutar bloque con BufferMode en Single cuando otro bloque esté activo. |
67 |
Drive en estado "Disabled" o "ErrorStop". |
69 |
Drive en estado "Stopping". |
70 |
Intento de ejecutar bloque con BufferMode en Buffered cuando otro bloque esté activo y otro bloque esté aguardando. |
71 |
P202 diferente de 4. |
74 |
Drive en estado "Homing". |
78 |
Bloque MC no ejecutado - Falla interna |
85 |
CamTableID inválido. |
Ejemplo en Ladder
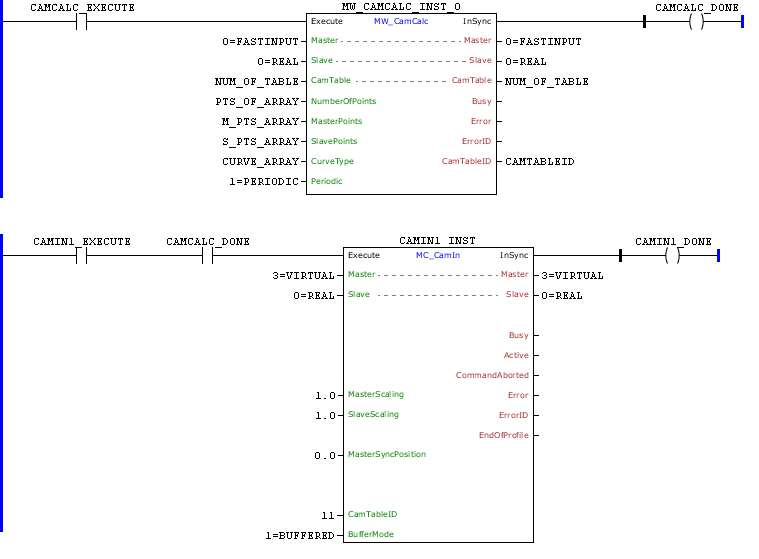
En la transición de subida de CAMCALC_EXECUTE, el bloque MW_CamCalc es ejecutado y la tabla de puntos NUM_OF_TABLE será calculada de acuerdo con los argumentos del bloque.
Al finalizar el cálculo de la tabla de puntos, la salida InSync es ajustada mientras ça entrada Execute permanece ajustada.
Con CAMCALC_DONE ajustado, el bloque MC_CamIn podrá ser ejecutado.
En la transición de subida de CAMIN1_EXECUTE, el primer bloque MC_CamIn es ejecutado.
En caso de que haya necesidad de algún ajuste en la tabla de puntos de la curva CAM, basta hacer el ajuste en MASTER_PT[0], MASTER_PT[1], SLAVE_PT[0] y SLAVE_PT[1], cambiar el contenido de NUM_OF_TABLE para 12 y ejecutar nuevamente el bloque MW_CamCalc.
Ejemplo en ST
El siguiente ejemplo muestra las instrucciones para aplicar el ejemplo anterior en el lenguaje ST.
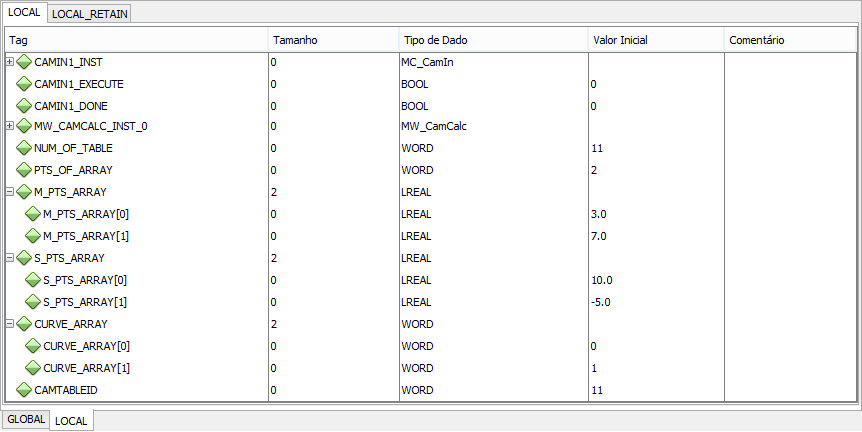
VAR CAMCALC_EXECUTE, CAMCALC_DONE, CAMIN1_EXECUTE, CAMIN1_DONE : BOOL; NUM_OF_TABLE, PTS_OF_ARRAY : WORD; CAMTABLEID : UINT; CURVE_ARRAY : ARRAY [0..1] OF WORD; M_PTS_ARRAY, S_PTS_ARRAY : ARRAY [0..1] OF LREAL; MW_CAMCALC_INST_0 : FB_MW_CamCalc; MC_CAMIN_INST_0 : FB_MC_CamIn; END_VAR
M_PTS_ARRAY[0] := FB_WORD_TO_LREAL(PAR_1050); M_PTS_ARRAY[1] := FB_WORD_TO_LREAL(PAR_1050); S_PTS_ARRAY[0] := FB_WORD_TO_LREAL(PAR_1050); S_PTS_ARRAY[1] := FB_WORD_TO_LREAL(PAR_1050); CURVE_ARRAY[0] := FB_STORE(WORD#0); CURVE_ARRAY[1] := FB_STORE(WORD#1);
MW_CAMCALC_INST_0.Execute := CAMCALC_EXECUTE; MW_CAMCALC_INST_0( Master:=0, Slave:=0, CamTable:=NUM_OF_TABLE, NumberOfPoints:=PTS_OF_ARRAY, MasterPoints:=M_PTS_ARRAY, SlavePoints:=S_PTS_ARRAY, CurveType:=CURVE_ARRAY, Periodic:=0); CAMTABLEID := MW_CAMCALC_INST_0.CamTableID; CAMCALC_DONE := MW_CAMCALC_INST_0.InSync;
MC_CAMIN_INST_0.Execute := CAMIN1_EXECUTE AND CAMCALC_DONE; MC_CAMIN_INST_0( Master:=3, Slave:=0, MasterScaling:=1.0, SlaveScaling:=1.0, MasterSyncPosition:=LREAL#0.0, CamTableID:=11, BufferMode:=1); CAMIN1_DONE := MC_CAMIN_INST_0.InSync;
|
|---|