|
MW_Stop2 Parada controlada de eixo |
  
|
|
MW_Stop2 Parada controlada de eixo |
|
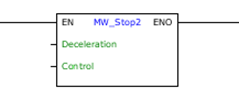
Bloque encargado de realizar una parada controlada.
Representación Ladder
Estructura del Bloque
Tipo de Variable |
Nombre |
Tipo de Dato |
Descripción |
VAR_INPUT |
EN |
BOOL |
Habilitación del bloque |
Deceleration |
REAL INT UINT WORD |
Desaceleración de la parada [rpm/s] |
|
Control |
0 = Automatic 1 = Velocity 2 = Position |
Define el tipo de control al final de la parada: Automático: mantiene el control de la corriente. Velocidad: no mantiene la posición después de finalizar la parada. Posición: mantiene la posición después de finalizar la parada. |
|
VAR_OUTPUT |
ENO |
BOOL |
Habilitación de la salída |
Operación
Si la entrada EN es "0", el bloque no se ejecuta y la salida ENO es cero.
Si la entrada EN es 1, aunque sea a través de un ciclo de barrido, se realiza una parada con perfil trapezoidal en función de las características programadas en los argumentos.
Cuando se completa la parada, la salida ENO pasa a 1 durante un ciclo de exploración, volviendo a 0 más tarde.
Una vez iniciado, el bloque de parada ya no se cancela hasta su parada total, incluso si la entrada EN pasa a 0 antes del final de su parada.
Si el modo de control se establece en Posición, mientras la entrada EN esté en 1, se mantendrá la posición después de que se complete la parada.
|
¡NOTA! El modo de control de posición solo se permite cuando el tipo de control del motor es Encoder (P0202 = 4). |
|
¡NOTA! Si el valor del parámetro P0133 (Velocidad Mínima) es diferente de cero, al ejecutar el bloque MW_Stop2, se realizará la deceleración de la velocidad del motor hasta el valor de P0133. |