|
MW_SRamp Gera Referência de Velocidade com Perfil S |
  
|
|
MW_SRamp Gera Referência de Velocidade com Perfil S |
|
Bloque que envía la referencia de velocidad con perfil S.
Representación Ladder
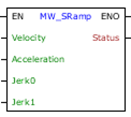
Estructura del Bloque
Tipo de Variable |
Nombre |
Tipo de Dato |
Descripción |
VAR_INPUT |
EN |
BOOL |
Habilitación del bloque |
Velocity |
REAL INT UINT WORD |
Velocidad deseada [rpm] |
|
Acceleration |
REAL INT UINT WORD |
Aceleración máxima de movimento [rpm/s] |
|
Jerk0 |
REAL INT UINT WORD |
Jerk inicial do movimento [rpm/s²] |
|
Jerk1 |
REAL INT UINT WORD |
Jerk final do movimento [rpm/s²] |
|
VAR_OUTPUT |
ENO |
BOOL |
Habilitación da salída |
Status |
INT UINT WORD |
Estado actual de movimento |
Operación
La entrada EN es responsable de habilitar el bloqueo cuando hay una transición positiva.
La salida ENO le informa cuando se ha alcanzado la velocidad.
Si la entrada EN es 0, el bloque no se ejecuta y la salida ENO es cero.
Este bloque genera un perfil de rampa S, controlando la velocidad partiendo de la velocidad actual, hasta alcanzar la velocidad deseada. Si hay una nueva transición en la entrada EN, se ejecuta un nuevo perfil.
Si hay una transición de 0 a 1 en la entrada EN, si el variador está habilitado, la referencia es a través de SoftPlc, no hay otro bloque de movimiento activo, excepto otro bloque MW_SRamp, se genera el perfil de velocidad de rampa S , y la salida ENO pasa a 1 cuando se alcanza la velocidad deseada. Durante la trayectoria, el Estado se actualiza según el estado de ejecución del movimiento.
Este bloque solo se finaliza si se activa un bloque MW_Stop2.
|
¡NOTA!
Valores de 0 para Jerk0 o Jerk1, deshabilitan el perfil de ruta S. No se permiten valores negativos de aceleración y tirón. |
Códigos e descrição do Status:
Código |
Descrição |
0 |
deshabilitado |
1 |
movimento iniciado |
2 |
movimento abortado |
10 |
ejecutando Jerk0 |
11 |
ejecutando a aceleración constante |
12 |
ejecutando Jerk1 |
20 |
Desaceleración programada maior que a máxima permitida. |
201 |
drive desabilitado |
202 |
motor parado |
203 |
referência não está via SoftPLC |
204 |
drive em falha |
205 |
ejecutando outro bloco de movimento |
207 |
aceleración inválida |
208 |
Jerk0 inválido |
209 |
Jerk1 inválido |
Ejemplo en Ladder
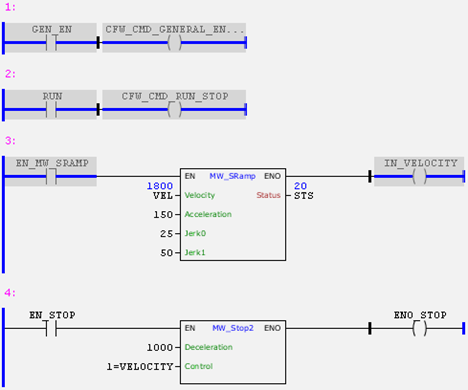
En el ejemplo anterior, si el variador está habilitado y con el comando RUN, cuando ocurre una transición positiva en EN_MW_SRAMP, el bloque MW_SRamp se ejecutará de acuerdo con los valores de los argumentos de entrada. Al alcanzar la velocidad deseada, la salida ENO pasa a 1.
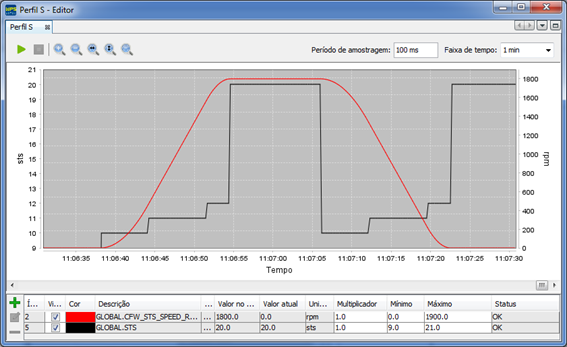
En el gráfico de tendencia a continuación, es posible observar el perfil S de referencia de velocidad en rojo y el estado del bloque en negro. Al inicio del movimiento, Status tiene un valor de 10 y Jerk0 está ejecutando, hasta que alcanza la máxima aceleración cuando comienza a ejecutar el movimiento con aceleración constante y Status tiene un valor de 11. Al final del Perfil S, el bloque ejecuta Jerk1 y el Estado tiene un valor de 12 hasta alcanzar la velocidad deseada. Cuando se alcanza la velocidad deseada, el Estado tiene un valor de 20 y es en ese momento que la salida ENO pasa a 1.
En la gráfica se puede verificar que luego de unos instantes el motor alcanza la velocidad deseada de 1800 rpm, se habilita nuevamente el bloqueo y se ejecuta un nuevo Perfil S hasta alcanzar la nueva velocidad deseada de cero rpm.
Para detener el motor, se debe habilitar el bloque MW_Stop2 o ejecutar el bloque MW_SRamp con el argumento de entrada Velocity con valor cero.
Ejemplo en ST
El siguiente ejemplo muestra las instrucciones para aplicar el ejemplo anterior en el lenguaje ST.
VAR GEN_EN, RUN, EN_MW_SRAMP : BOOL := TRUE; IN_VELOCITY, EN_STOP, ENO_STOP : BOOL; VEL, STS : WORD; END_VAR
CFW_CMD_GENERAL_ENABLE := GEN_EN; CFW_CMD_RUN_STOP := RUN; FB_MW_SRamp( Execute:=EN_MW_SRAMP, Velocity:=VEL, Acceleration:=150, Jerk0:=25, Jerk1:=50, Status=>STS, Done=>IN_VELOCITY);
FB_MW_Stop2( Execute:=EN_STOP, Deceleration:=1000, Control:=1, Done=>ENO_STOP);
|
|---|