|
Marcadores de Sistema |
  
|
|
Marcadores de Sistema |
|
As variáveis abaixo, contidas no grupo GLOBAL_SYSTEM da tabela de variáveis, possuem o tag fixo. O tag dos marcadores de sistema foram divididos em grupos e subgrupos sendo:
Grupos:
| • | SCA: variáveis de leitura e escrita do servoconversor SCA06; |
| • | CO: variáveis de leitura e escrita da rede de comunicação CANopen. |
Subgrupos:
| • | STS: variável de leitura (status); |
| • | CMD: variável de escrita (comando). |
Marcadores de Sistema de Leitura (Status)
Endereço |
Bit |
Modbus |
Tag |
Descrição |
Ladder |
||||
%SB6000 |
0 |
0 |
FREQ_2HZ |
Oscilador com frequência de 2 Hz |
%SB6000 |
1 |
1 |
PULSE_1SCAN |
Pulso durante o primeiro ciclo de scan |
%SB6000 |
2 |
2 |
FALSE |
Sempre em 0 |
%SB6000 |
3 |
3 |
TRUE |
Sempre em 1 |
%SW6002 |
-- |
3001 |
ELAPSED_SCAN_CYCLES |
Ciclos de scan transcorridos |
Eixo Real |
||||
%SW6004 |
-- |
3002 |
SCA_STS_REAL_AXIS_STATUS |
Estado do eixo real (ver nota) |
%SD6008 |
-- |
3004 |
SCA_STS_REAL_AXIS_VELOCITY |
Velocidade do eixo real |
%SL6024 |
-- |
3012 |
SCA_STS_REAL_AXIS_POSITION |
Posição do eixo real |
Eixo Virtual |
||||
%SW6006 |
-- |
3003 |
SCA_STS_VIRTUAL_AXIS_STATUS |
Estado do eixo virtual (ver nota) |
%SD6012 |
-- |
3006 |
SCA_STS_VIRTUAL_AXIS_VELOCITY |
Velocidade do eixo virtual |
%SL6032 |
-- |
3016 |
SCA_STS_VIRTUAL_AXIS_POSITION |
Posição do eixo virtual |
Corrente |
||||
%SD6016 |
-- |
3008 |
SCA_STS_MOTOR_CURRENT |
Corrente no motor |
Posição na transição de DI´s |
||||
%SD6040 |
-- |
3020 |
SCA_STS_DI1_POSITION_STORED |
Posição armazenada na transição da DI1 |
%SD6048 |
-- |
3024 |
SCA_STS_DI2_POSITION_STORED |
Posição armazenada na transição da DI2 |
%SD6056 |
-- |
3028 |
SCA_STS_DI3_POSITION_STORED |
Posição armazenada na transição da DI3 |
Contadores |
||||
%SD6064 |
-- |
3032 |
SCA_STS_BUILT_IN_COUNTER |
Valor do contador padrão |
%SD6068 |
-- |
3034 |
SCA_STS_BUILT_IN_COUNTER_DI3 |
Valor do contador padrão armazenado na transição da DI3 |
%SD6072 |
-- |
3036 |
SCA_STS_ENC1_COUNTER |
Valor do contador do encoder 1 |
%SD6076 |
-- |
3038 |
SCA_STS_ENC2_COUNTER |
Valor do contador do encoder 2 |
%SD6080 |
-- |
3040 |
SCA_STS_ENC_COUNTER_Z1 |
Contador de encoder armazenado na transição do Z1 conforme definido em P00511 |
%SD6084 |
-- |
3042 |
SCA_STS_ENC_COUNTER_Z2 |
Contador de encoder armazenado na transição do Z2 conforme definido em P00521 |
CANopen |
||||
%SB6100 |
0 |
800 |
CO_STS_MASTER_CONTACTED |
Mestre CANopen contactou todos os escravos |
%SB6100 |
1 |
801 |
CO_STS_MASTER_CONFIG_OK |
Mestre CANopen fez download das configurações dos escravos |
%SB6100 |
2 |
802 |
CO_STS_MASTER_ERROR_CTRL_OK |
Protocolo de controle de erros (node guarding/heartbeat) iniciado com os escravos |
%SB6100 |
3 |
803 |
CO_STS_MASTER_INIT_FINISHED |
Inicialização de todos os escravos realizada pelo mestre CANopen |
%SB6100 |
4 |
804 |
CO_STS_MASTER_INIT_ERROR |
Algum escravo apresentou erro de inicialização |
%SB6100 |
5 |
805 |
CO_STS_MASTER_ERROR_CTRL |
Detectado falha em algum escravo no protocolo de detecção de erros pelo mestre CANopen |
%SB6100 |
6 |
806 |
CO_STS_MASTER_EMCY |
Algum escravo reportou EMCY |
%SB6101 |
0 |
808 |
CO_STS_MASTER_NMT_TOGGLE |
Feedback do toggle bit do comando NMT |
%SB6101 |
5 |
813 |
CO_STS_MASTER_BUS_OFF |
Mestre CANopen está em bus off |
%SB6101 |
6 |
814 |
CO_STS_MASTER_POWER_OFF |
Mestre CANopen não possui alimentação na interface CAN |
%SB6101 |
7 |
815 |
CO_STS_MASTER_COMM_DISABLED |
Comunicação do mestre CANopen está desabilitada |
%SB6102 |
0 |
816 |
CO_STS_SLAVE1_CONTACTED |
Escravo no endereço indicado foi contactado com sucesso pelo mestre CANopen |
%SB6102 |
1 |
817 |
CO_STS_SLAVE1_CONFIG_OK |
Configuração do escravo foi feita com sucesso pelo mestre CANopen |
%SB6102 |
2 |
818 |
CO_STS_SLAVE1_ERROR_CTRL_OK |
Protocolo de controle de erros (node guarding/heartbeat) iniciado com o escravo |
%SB6102 |
3 |
819 |
CO_STS_SLAVE1_INIT_FINISHED |
Inicialização do escravo concluída |
%SB6102 |
4 |
820 |
CO_STS_SLAVE1_INIT_ERROR |
Erro na inicialização do escravo no endereço indicado |
%SB6102 |
5 |
821 |
CO_STS_SLAVE1_ERROR_CTRL_FAIL |
Detectado falha em algum escravo no protocolo de detecção de erro pelo mestre CANopen |
%SB6102 |
6 |
822 |
CO_STS_SLAVE1_EMCY |
Escravo no endereço indicado reportou erro por EMCY |
%SB6104 |
0 |
832 |
CO_STS_SLAVE2_CONTACTED |
Escravo no endereço indicado foi contactado com sucesso pelo mestre CANopen |
%SB6104 |
1 |
833 |
CO_STS_SLAVE2_CONFIG_OK |
Configuração do escravo foi feita com sucesso pelo mestre CANopen |
%SB6104 |
2 |
834 |
CO_STS_SLAVE2_ERROR_CTRL_OK |
Protocolo de controle de erros (node guarding/heartbeat) iniciado com o escravo |
%SB6104 |
3 |
835 |
CO_STS_SLAVE2_INIT_FINISHED |
Inicialização do escravo concluída |
%SB6104 |
4 |
836 |
CO_STS_SLAVE2_INIT_ERROR |
Erro na inicialização do escravo no endereço indicado |
%SB6104 |
5 |
837 |
CO_STS_SLAVE2_ERROR_CTRL_FAIL |
Detectado falha em algum escravo no protocolo de detecção de erro pelo mestre CANopen |
%SB6104 |
6 |
838 |
CO_STS_SLAVE2_EMCY |
Escravo no endereço indicado reportou erro por EMCY |
... |
... |
... |
... |
... |
%SB6354 |
0 |
2832 |
CO_STS_SLAVE127_CONTACTED |
Escravo no endereço indicado foi contactado com sucesso pelo mestre CANopen |
%SB6354 |
1 |
2833 |
CO_STS_SLAVE127_CONFIG_OK |
Configuração do escravo foi feita com sucesso pelo mestre CANopen |
%SB6354 |
2 |
2834 |
CO_STS_SLAVE127_ERROR_CTRL_OK |
Protocolo de controle de erros (node guarding/heartbeat) iniciado com o escravo |
%SB6354 |
3 |
8235 |
CO_STS_SLAVE127_INIT_FINISHED |
Inicialização do escravo concluída |
%SB6354 |
4 |
2836 |
CO_STS_SLAVE127_INIT_ERROR |
Erro na inicialização do escravo no endereço indicado |
%SB6354 |
5 |
2837 |
CO_STS_SLAVE127_ERROR_CTRL_FAIL |
Detectado falha em algum escravo no protocolo de detecção de erro pelo mestre CANopen |
%SB6354 |
6 |
2838 |
CO_STS_SLAVE127_EMCY |
Escravo no endereço indicado reportou erro por EMCY |
%SW6360 |
-- |
3180 |
CO_SDO_ERROR_NODE_ID |
Erro de SDO: endereço do escravo do último erro de SDO detectado |
%SW6362 |
-- |
3181 |
CO_SDO_ERROR_OBJECT_INDEX |
Erro de SDO: índice do objeto |
%SW6364 |
-- |
3182 |
CO_SDO_ERROR_OBJECT_SUBINDEX |
Erro de SDO: sub-índice do objeto |
%SW6366 |
-- |
3183 |
CO_SDO_ERROR_FUNCTION |
Erro de SDO: função (leitura/escrita) |
%SD6368 |
-- |
3184 |
CO_SDO_ERROR_VALUE |
Erro de SDO: valor |
%SD6372 |
-- |
3186 |
CO_SDO_ERROR_CODE |
Erro de SDO: código do erro |
%SB6380 |
-- |
3190 |
CO_EMCY_SLAVE_ID |
Último EMCY reportado: endereço do escravo |
%SB6382 |
-- |
3191 |
CO_EMCY_DATA |
Último EMCY reportado: dados do objeto |
Marcadores de Sistema de Escrita / Leitura (Comando)
Endereço |
Bit |
Modbus |
Tag |
Descrição |
CANopen |
||||
%CB6000 |
-- |
3000 |
CO_CMD_NMT_COMMAND |
Envio de comando NMT pelo mestre CANopen: código do comando |
%CB6001 |
0 |
8 |
CO_CMD_NMT_TOGGLE |
Envio de comando NMT pelo mestre CANopen: toggle bit |
%CB6001 |
7 |
15 |
CO_CMD_DISABLE |
Desabilita comunicação CANopen |
%CB6002 |
-- |
3001 |
CO_CMD_NMT_SLAVE_ADDR |
Envio de comando NMT pelo mestre CANopen: endereço do escravo |
NOTA!
Abaixo descrição dos estados do eixo real e virtual:
0. Disabled (Desabilitado).
1. Errorstop (Eixo com falha).
2. Standstill (Habilitado e nenhum bloco de movimento ativo).
3. Stopping (Stop em execução).
4. Homing (Referenciando).
5. Continuous Motion (Movimento contínuo).
6. Discrete Motion (Movimento discreto).
7. Synchronized Motion (Movimento sincronizado).
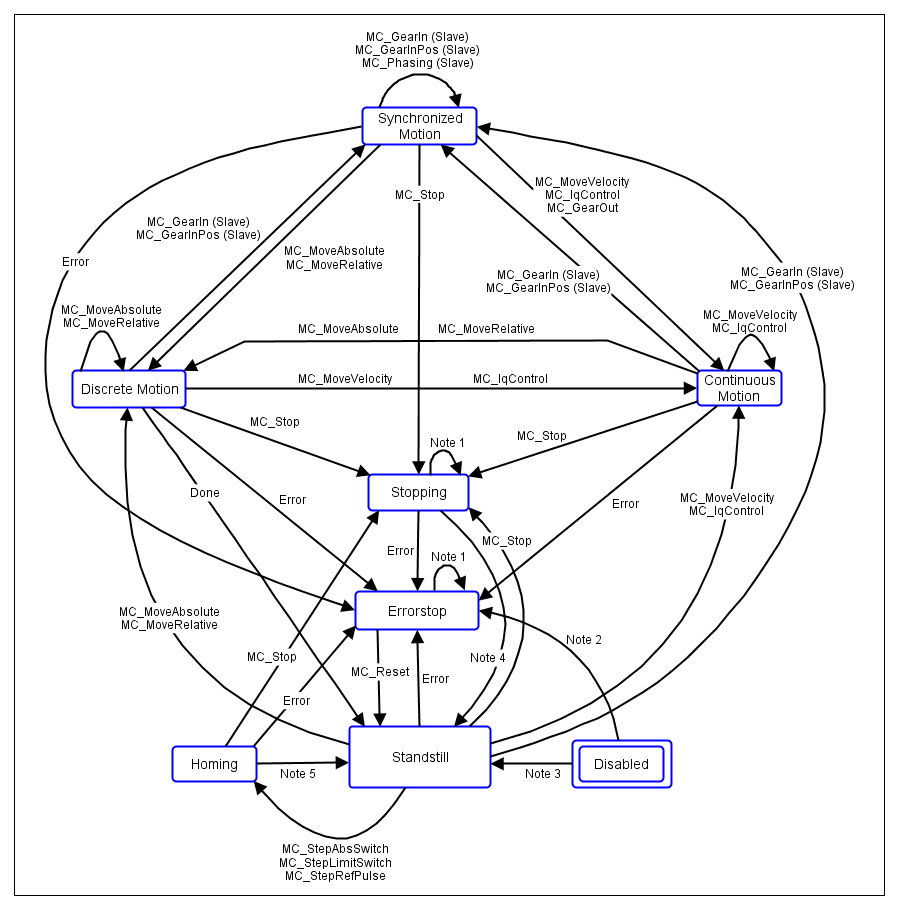
Note 1: Quando o drive estiver no estado "Stopping" ou "Errorstop" todos os blocos podem ser chamados, mas somente o bloco MC_Reset será executado;
Note 2: Tentativa de habilitar o drive, mas o drive está em falha;
Note 3: Habilitação do drive e o drive não está em falha;
Note 4: MC_Stop.Done é verdadeiro e MC_Stop.Execute é falso;
Note 5: MC_StepDirect, MC_StepRefPulse ou MC_FinishHoming.