|
Principales Señales |
  
|
|
Principales Señales |
|
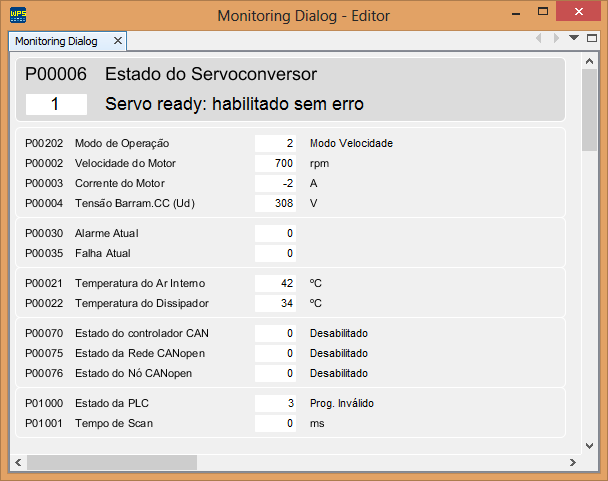
La ventana Principales Señales suministra una visión general de las principales señales del equipo:
| • | Estado del drive (P00006), |
| • | Indicaciones generales (P00202, P00002, P00003 y P00004), |
| • | Alarma (P00030) y falla (P00035), |
| • | Temperaturas (P00021 y P00022), |
| • | Estados de las redes (P00070, P00075 y P00076), |
| • | Informaciones del PLC (P01000 y P01001). |
Las principales señales son detalladas abajo.
Parámetro |
Función |
Descripción |
P00006 |
Estado del Servoconvertidor |
Indica el estado actual del servoconvertidor |
P00202 |
Modo de Operación |
Define el modo de operación del servoconvertidor, o sea, cuál es la variable que se desea controlar: Torque, Velocidad o si el control será hecho vía Ladder, CANopen o Profibus |
P00002 |
Velocidad del Motor |
Indica el valor de la velocidad real en rpm del servomotor, excepto cuando sea programado para recibir realimentación de posición/velocidad externa |
P00003 |
Corriente del Motor |
Indica el valor de la corriente Iq de salida, en amperes rms, del servoconvertidor |
P00004 |
Tensión del Enlace CC |
Indica la tensión actual en el Enlace CC en volts (V) |
P00030 |
Alarma Actual |
Indican el número de la alarma que eventualmente está presente en el servoconvertidor |
P00035 |
Falla Actual |
Indican el número de la falla que eventualmente está presente en el servoconvertidor |
P00021 |
Temperatura del aire Interno |
Este parámetro presenta, en grados Celsius, la temperatura del aire interno |
P00022 |
Temperatura del disipador |
Este parámetro presenta, en grados Celsius, la temperatura del disipador. |
P00070 |
Estado del Controlador CAN |
Indica el estado del controlador CAN, responsable por enviar y recibir telegramas CAN |
P00075 |
Estado de la Red CANopen |
Indica el estado de la comunicación CANopen, informando si el protocolo fue inicializado correctamente, así como el estado del servicio guarding del esclavo. |
P00076 |
Estado del Nudo CANopen |
Cada dispositivo en la red CANopen posee un estado asociado. A través de este parámetro es posible visualizar el estado actual del servoconvertidor |
P01000 |
Estado del PLC |
Permite que el usuario visualice el status del programa |
P01001 |
Tiempo de Scan |
Permite que el usuario monitoree el tiempo del ciclo de barredura del programa en milisegundos |
La ventana puede ser visualizada abajo.