|
MW_PlcSetPosition1 |
  
|
|
MW_PlcSetPosition1 |
|
Bloque para configurar la posición actual del eje.
Representación Ladder
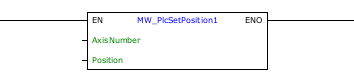
Estructura del Bloque
Tipo de Variable |
Nombre |
Tipo de Dato |
Descripción |
VAR_INPUT |
EN |
BOOL |
Habilitación del bloque |
AxisNumber |
CONST |
Eje seleccionado |
|
Position |
DINT |
Posición deseada |
|
VAR_OUTPUT |
ENO |
BOOL |
Habilitación de salida |
VAR |
MW_PlcSetPosition1_INST_0 |
MW_PlcSetPosition1 |
Instancia de acceso a la estructura del bloque |
Funcionamiento
Cuando la entrada EN cambie de FALSE a TRUE (flanco de subida), el bloque configurará la posición actual del eje, de acuerdo con el valor de "position".
|
¡NOTA! Es necesario que el control de motor de paso esté habilitado para el eje seleccionado. Vea el manual del usuario y el manual de parámetros. |
Ejemplo en Ladder
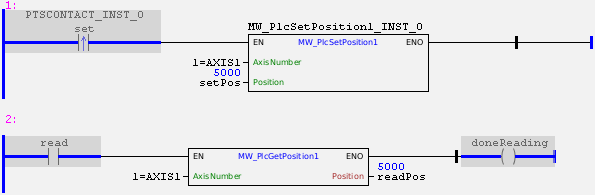
En el ejemplo de arriba, el contacto "set" altera la posición actual del eje 1 a 5000.
El contacto "read" habilita la lectura de la posición actual del eje1, permitiendo monitorear la alteración realizada.
Ejemplo en ST
El ejemplo de abajo exhibe las instrucciones para aplicación del ejemplo de arriba en lenguaje ST.
VAR set : BOOL := 1; read : BOOL := 1; doneReading : BOOL; setPos : DINT := 5000; readPos : DINT := 0; PTSCONTACT_INST_0 : FB_PTSCONTACT; MW_PlcSetPosition1_INST_0 : FB_MW_PlcSetPosition1; END_VAR
PTSCONTACT_INST_0(EN:=TRUE, BIT:=set);
MW_PlcSetPosition1_INST_0( EN:=PTSCONTACT_INST_0.Q, AxisNumber:=1, Position:=setPos);
doneReading := FB_MW_PlcGetPosition1( EN:=read, AxisNumber:=1, Position=>readPos);
|
|---|