|
MW_PlcStop2 |
  
|
|
MW_PlcStop2 |
|
Block to interrupt the pulse generation when controlling two stepper motors simultaneously.
Ladder Representation

Block Structure
Variable Type |
Name |
Data Type |
Description |
VAR_INPUT |
EN |
BOOL |
Block enabling |
VAR_OUTPUT |
ENO |
BOOL |
Output enabling |
VAR |
MW_PlcStopWithRamp2_INST_0 |
MW_PlcStopWithRamp2 |
Instance of access to block structure |
Operation
When the EN input changes from FALSE to TRUE (rising edge), the block starts a deceleration ramp for pulse generation for both stepper motors.
The deceleration ramp follows the configuration used in the ramp configuration block (MW_PlcChangeRamp1).
|
NOTE! The stepper motor control must be enabled for both axes. Look at the user manual and parameter manual. |
Example in Ladder
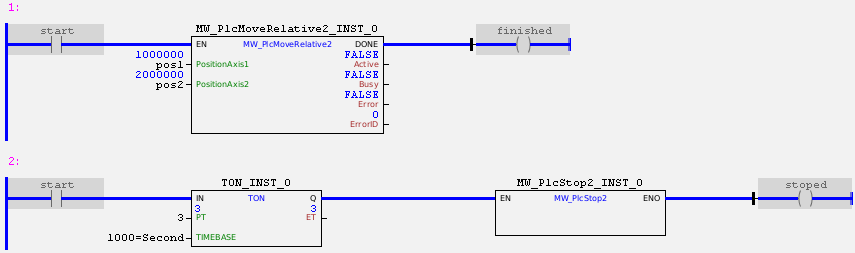
When the "start" contact is activated, a PWM signal is generated on the pulse output of axis 1 with an initial frequency of 0 Hz and a duty cycle of 50%. The direction output of axis 1 is set to a low level (considering that the direction has not been inverted via parameters), and a synchronized ramp with axis 2 is performed.
A PWM signal is also generated on the pulse output of axis 2 with an initial frequency of 0 Hz and a duty cycle of 50%. The direction output of axis 2 is set to a high level (considering that the direction has not been inverted via parameters), and a synchronized ramp with axis 1 is performed.
In parallel, the "start" contact starts a 3-second timer which, at the end of the time, will initiate a deceleration ramp for the pulses on both axes, and the move block will be completed, regardless of the number of pulses generated.
Example in ST
The example below displays instructions for applying the functional example in ST language.
VAR start : BOOL := 0; finished : BOOL; stopped : BOOL; pos1 : DINT := 1000000; pos2 : DINT := 2000000; MW_PlcMoveRelative2_INST_0 : FB_MW_PlcMoveRelative2; MW_PlcStopWithRamp2_INST_0 : FB_MW_PlcStopWithRamp2; TON_INST_0 : FB_TON; END_VAR
MW_PlcMoveRelative2_INST_0.EN := start; MW_PlcMoveRelative2_INST_0( AxisNumber:=1, Position:=pos); finished := MW_PlcMoveRelative2_INST_0.DONE;
TON_INST_0.EN := start; TON_INST_0(PT:=3, TIMEBASE:=1000);
MW_PlcStopWithRamp2_INST_0.EN := TON_INST_0.Q; MW_PlcStopWithRamp2_INST_0(ENO=>stopped);
|
|---|